專案創作設計方案–自製迷宮車
本作品以POLOLU 3pi為藍本,自製相仿電路,利用 Arduino Nano為架構,加上馬達驅動,電源及LCD模組而成.只要完整了解 POLOLU 3pi 所提供的範例程式,就可以隨心所欲修改車體大小,架構屬於自己的迷宮車。
作品功能
- 5個紅外線sensor感測路徑。
- Lcd顯示目前狀態。
- 具有路徑學習能力。
- 以黑色電工膠帶為路徑。
- 可適應直角路徑。
POLOLU 3pi 線路圖
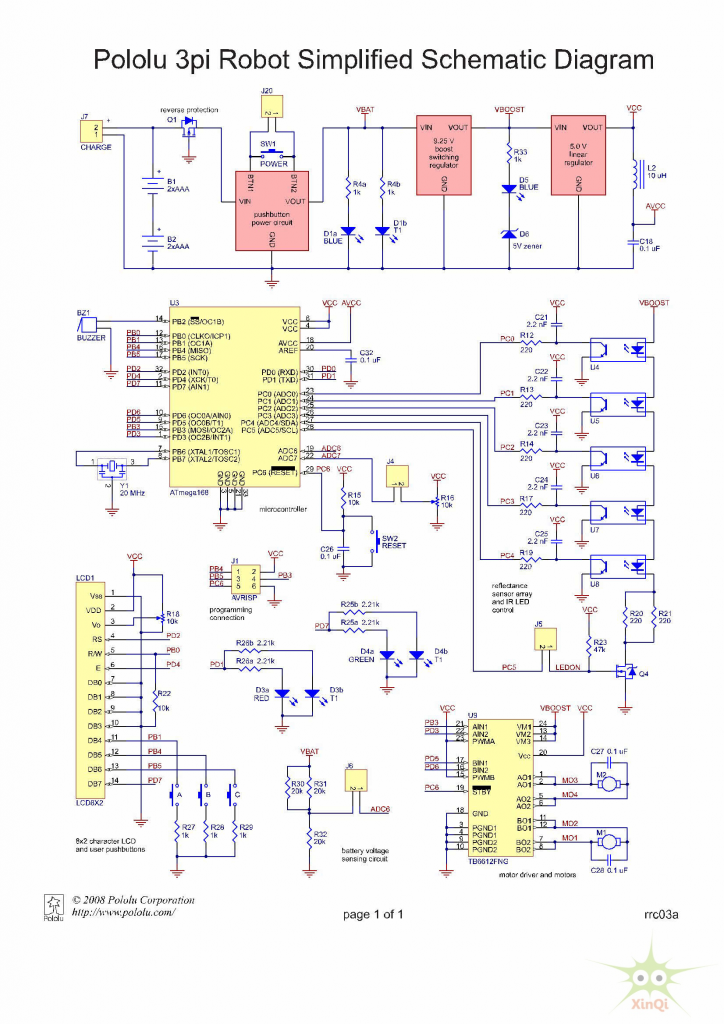
首先必須要了解電路圖的每個零件用途,當然若您是非科班出身,這一關就卡住了,不過想要製作迷宮車的玩家,應該都不是等閒之輩 。
研究線路後,發現大部分都可以找到相關電子模組,這樣可以節省不少製作時間 。
大部分電路是一樣的,但一些細節有做修改,例如電源開關電路本組就將其簡化,以實體開關取代,部分零件為求取得容易,也有調整,如紅外線收發感應器,Q4 MOSFET,車體結構,馬達轉速,非必要之LED也將其取消。
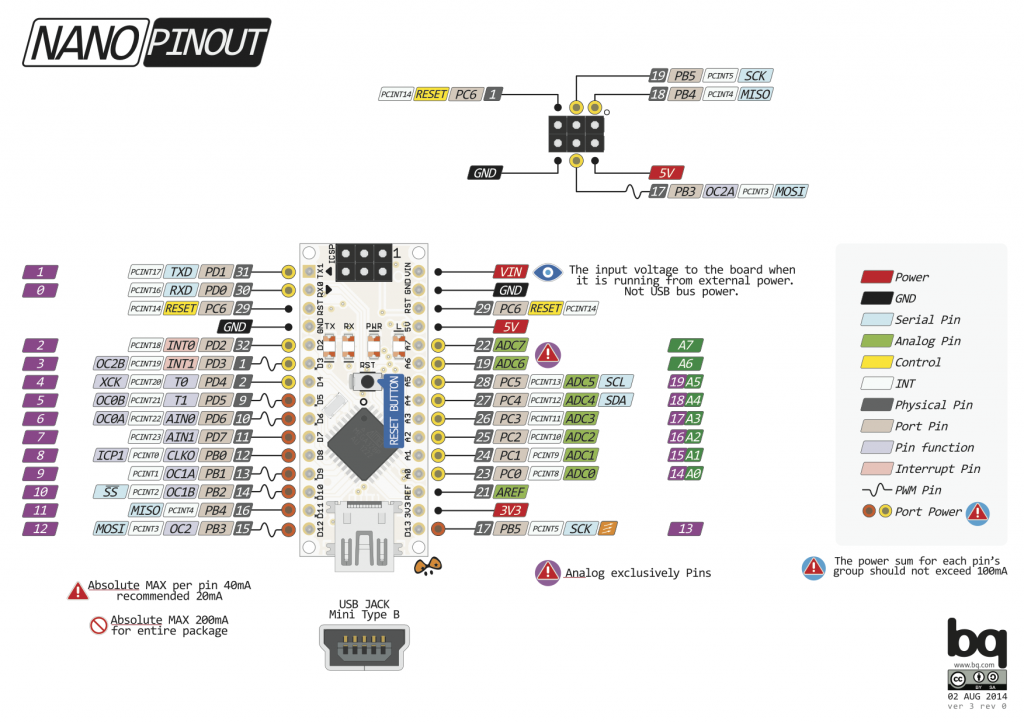
Arduino Nano板載震盪器為16MHz,也將其修改為20MHz。
RESET電路直接使用Arduino Nano板上RESET按鍵。
AVRISP燒錄介面也直接使用Arduino Nano板上針腳即可,但須注意腳位方向性。

U9 為馬達驅動控制模組。
M1,M2->N20-DC馬達。
LCD1->LCD16X2模組 (3Pi原設計為8X2模組)
有兩個比較特別的電路設計:
- 電源電路->電池電壓7.4V(2cell鋰電)先經過9.25V昇壓供電給紅外線模組及馬達電路使用,確保紅外線模組有及馬達電源有穩定的電源,再經由5V降壓穩壓電路,將電源穩定在DC5V,供其他所有電路使用
- 紅外線感測電路->這是一個相當特別的設計,感測電路是以充放電方式進行軌跡偵測,例如當紅外線U4元件偵測到白色時,2.2nf(C21)電容充電,當偵測到黑色時,2.2nf(C21)電容將對電阻220(R12)放電,利用程式取其時間間隔數值,達成一個模擬的類比數據,透過5顆(2) 紅外線感測器的偵測,利用PID技術,可正確導引小車的方向。

整個電路配置
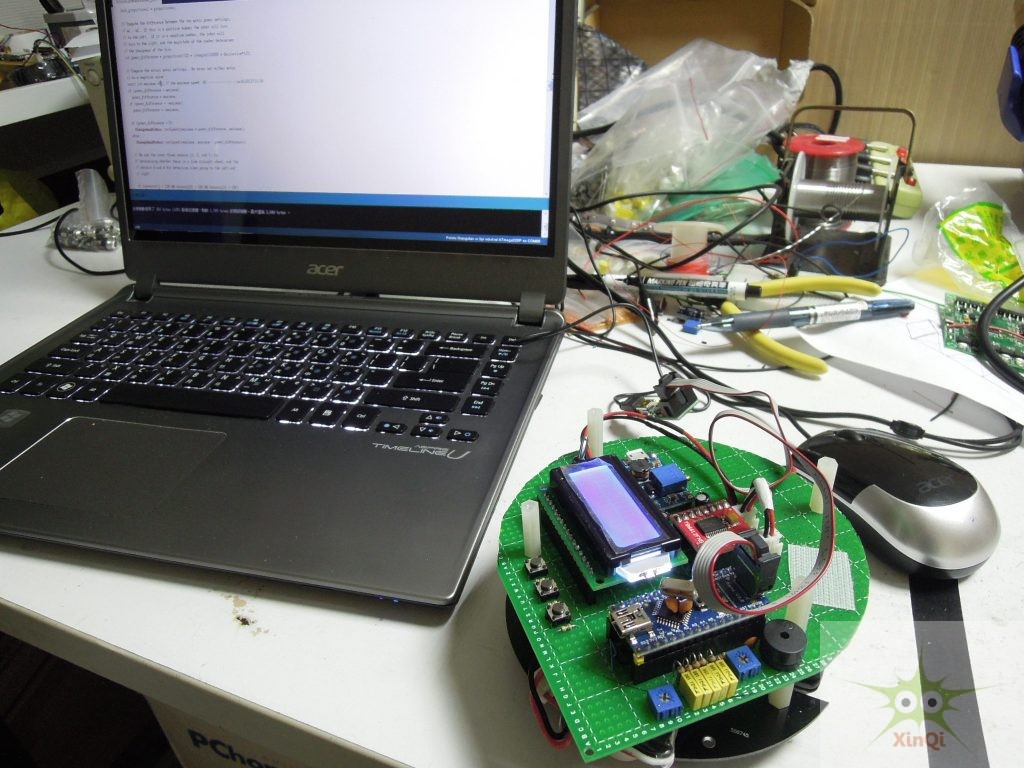
程式測試及燒錄 。
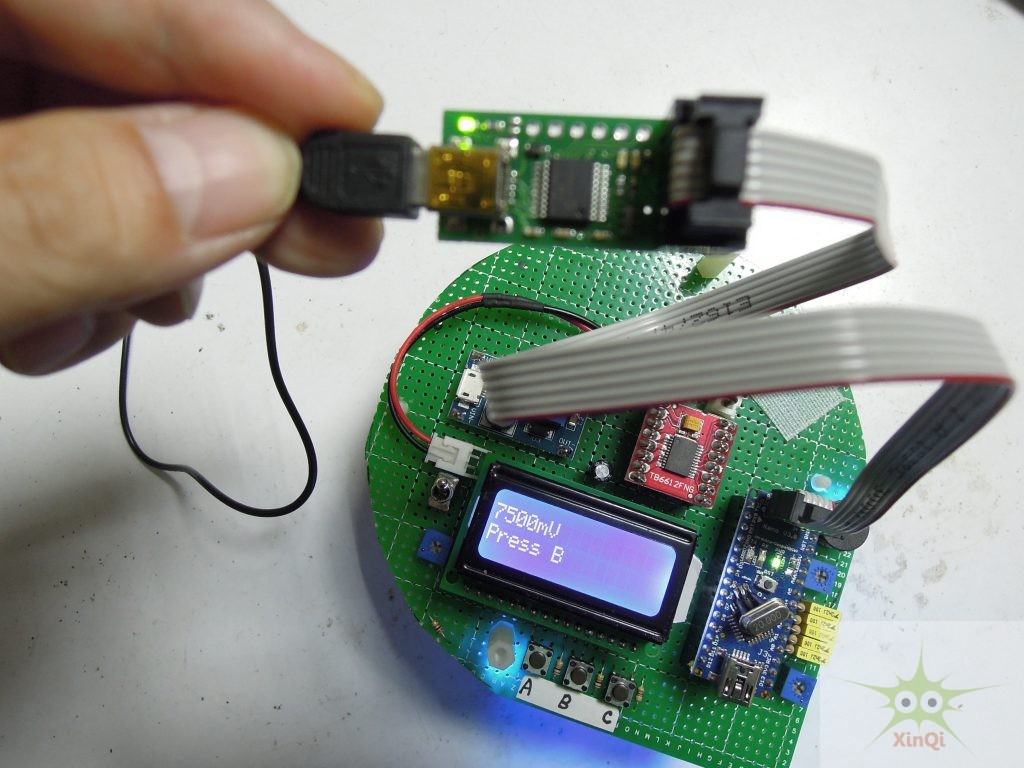
測試及驗證
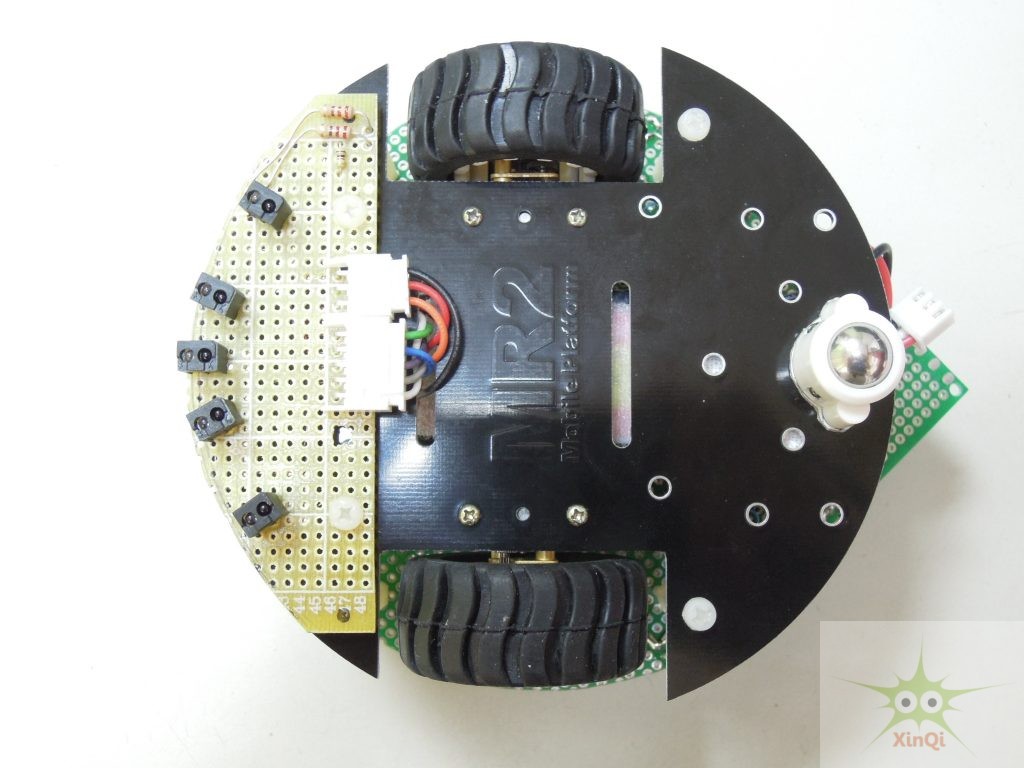
車體是一般容易取得的Arduino小車,感測置於車底,高度必須適當 。

20mm電工膠帶貼成的軌道 。