專案創作設計方案–無線遙控車(B版)
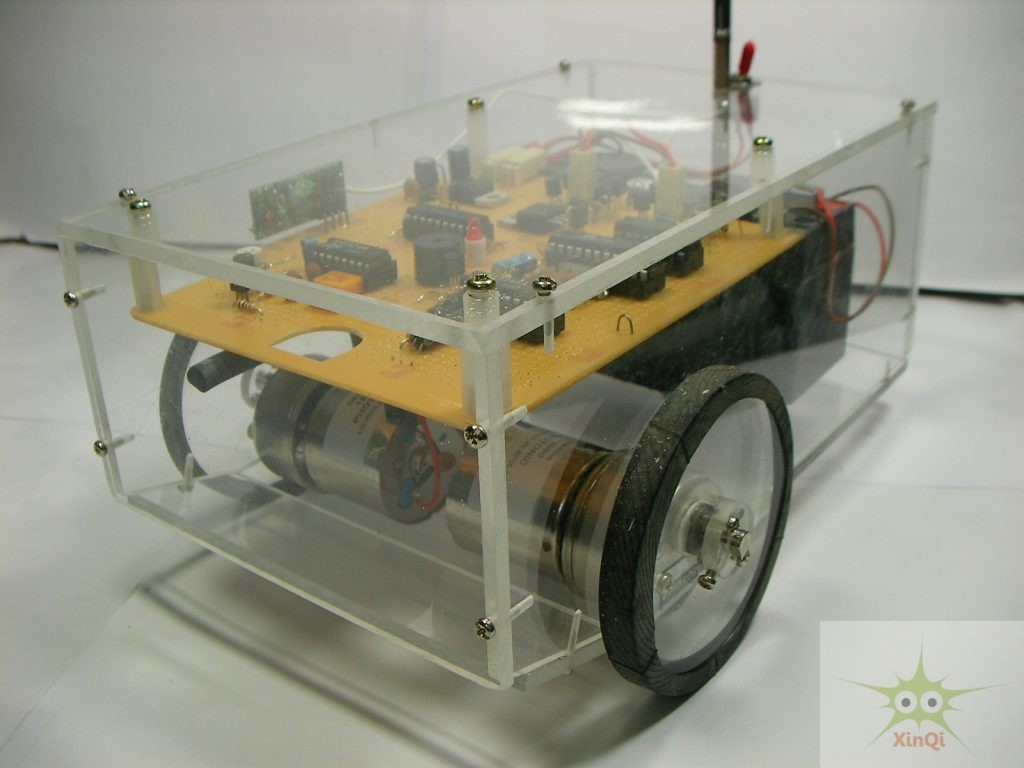
本作品主要是設計一無線遙控車, 作品90%以上都採用基本電子電路,IC及MCU組成,主要還是以學習的角度出發 。車體內共有2顆馬達,負責控制前進/後退,左轉/右轉,停車之功能,前方並設計障礙物偵測功能。
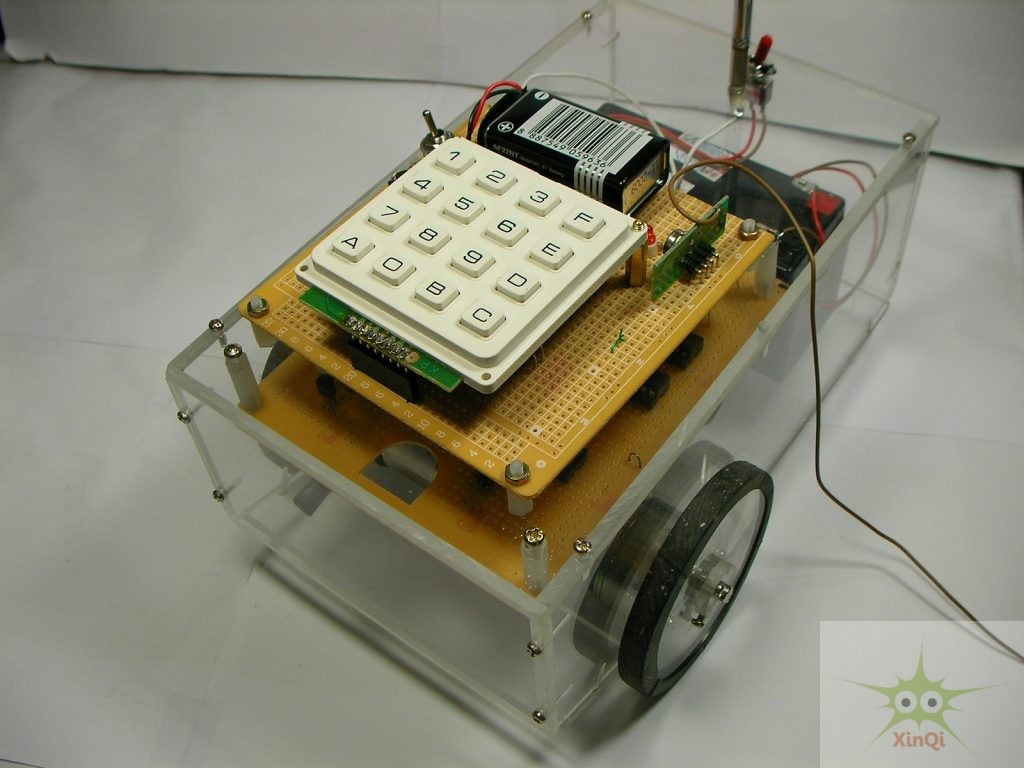
無線遙控採用容易取得的315MHz/434MHz 無線收發模組設計,遙控器透過74923 IC設計成多鍵輸入方式,並且考量了簡單的省電機制。
作品功能
- RF無線遙控功能。
- 使用HT12D/E IC編解碼。
- 遙控器採用4*4 鍵盤設計。
- 前進/後退,左轉/右轉,停車功能。
- 一組前方障礙物偵測功能(紅外線感測,感測距離約10cm~50cm可手動調整)。
- 遙控距離約10M 。
- 行車速度遙控功能,以PWM程式技術控制高/低速別。
- 電路工作原理
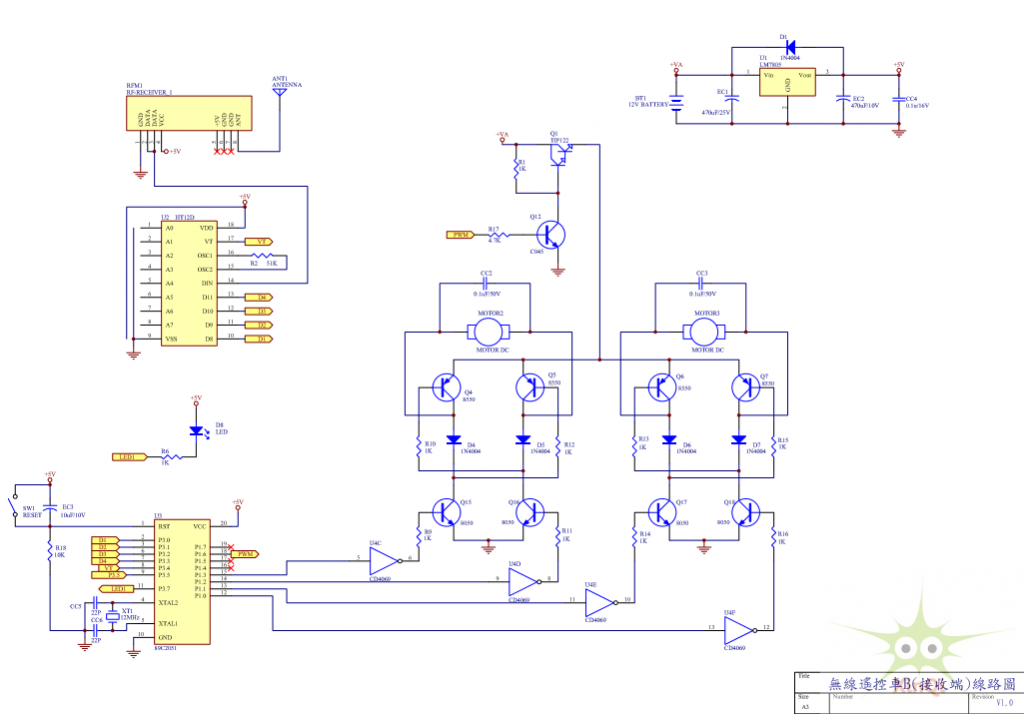
<接收電路>
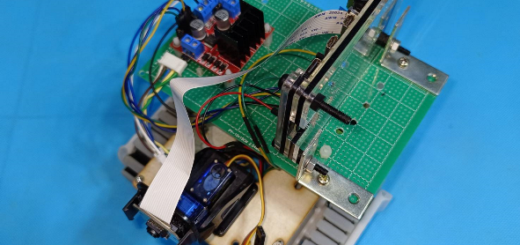
整體電路是以89C1051/2051MCU(U3)為核心,搭配其它晶片及電路組合而成。電池電壓(12V)供給馬達電路使用,經LM7805穩壓IC將電壓穩壓成5V,供給所有電路使用,D1二極體為電源逆向保護用。
Q4,Q5,Q15,Q16,R10,R12,R9,R11,D4,D5,MOTOR2構成DC馬達達靈頓驅動電路,負責左馬達之控制。Q6,Q7,Q17,Q18,R13,R15,R14,R16,D6,D7,MOTOR3構成DC馬達達靈頓驅動電路,負責右馬達之控制。CD4069/74LS04(U4)負責信號反相及電流提昇。CC2,CC3電容,負責消除馬達轉動時的火花,減少不必要的雜訊干擾。
Q1,Q12,R17構成一馬達電源控制電路,由於考量馬達變速的機制,故程式端是以PWM方式控制其電源平均電壓的高低。
障礙物感測電路由PT2248與PT2249 紅外線發射與接收IC電路所構成,紅外線發射電路透過發射LED將信號送出,當車前方有障礙物時,接收器接收信號後經接收IC解碼後,由對應碼控制I/O控制蜂鳴器鳴叫。
當RF接收模組收到信號後透過HT12D(U2)解碼,並將相對應之按鍵信號狀態送入MCU(U3)判斷, HT12D(U2)為一2^12解碼IC,通常用於RF信號解碼用,配對編碼IC為HT12E。。
EC3,R18,SW1構成MCU(U3)之RESET電路,XT1,CC5,CC6構成MCU(U3)之振盪電路。所有電路透過MCU(U3)所撰寫之程式加以規劃,整合及程序化得以符合此作品之功能。
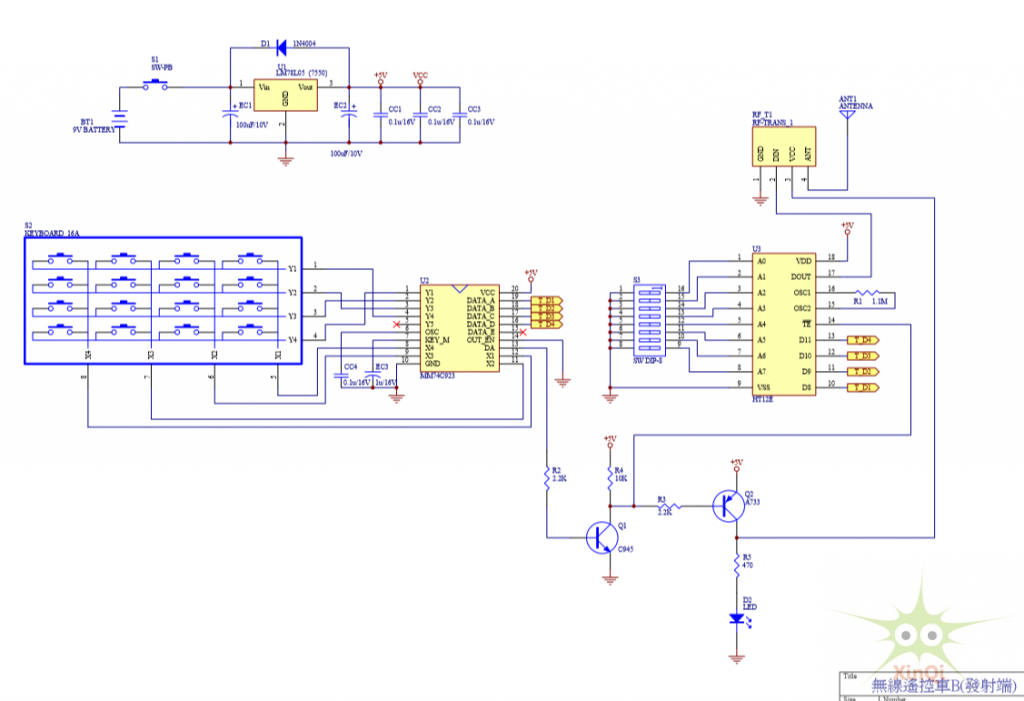
<發射電路>
電源電路,電池9V/DC,經EC1,7805(HT7550),EC2穩壓成5VDC供給所有電路使用,D1二極體為電源逆向保護用。
74C923(U2)為一顆5*5 矩陣鍵盤處理專用IC,最大可設計25鍵,本專題只設計16鍵,CC4為震盪頻率電容,EC3為彈跳延時電容,當有按鍵按下時,(U2)DA PIN將輸出一Hi信號(DA)經Q1,R2,R4將信號反相送入(U3)TE腳,DATA_A~DATA_E並相對應該鍵BCD碼輸出,此4BIT信號直接與HT12E編碼IC連結,此時發射信號送出(R3,Q2,R5,D2負責致能RF發射模組電源並點亮LED燈)達成省電效果。
HT12E(U3)為一2^12編碼IC,通常用於RF信號發射時編碼用,配對解碼IC為HT12D。
接收端操作方式
- 接上DC12V電池。
- 電源開關 ON。
發射端操作方式
- 接上DC9V電池。
- 將S1電源開關JUMPER接上。
- 按鍵對應
| 1 左前進 | 2 前進 | 3 右前進 | F X |
| 4 X | 5 STOP | 6 X | E X |
| 7 左後退 | 8 後退 | 9 右後退 | D X |
| A 低速 | 0 X | B 高速 | C X |
X-> 保留鍵 (無功能)