6軸機械手臂-手工全製版
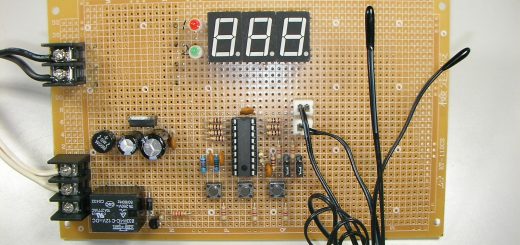
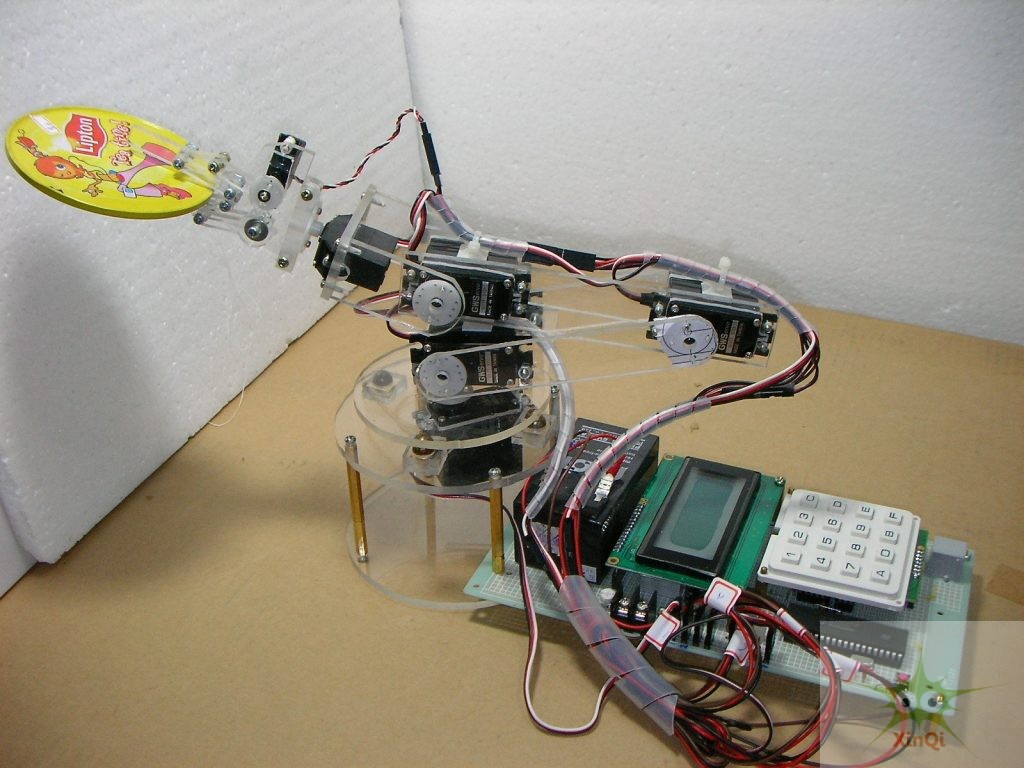
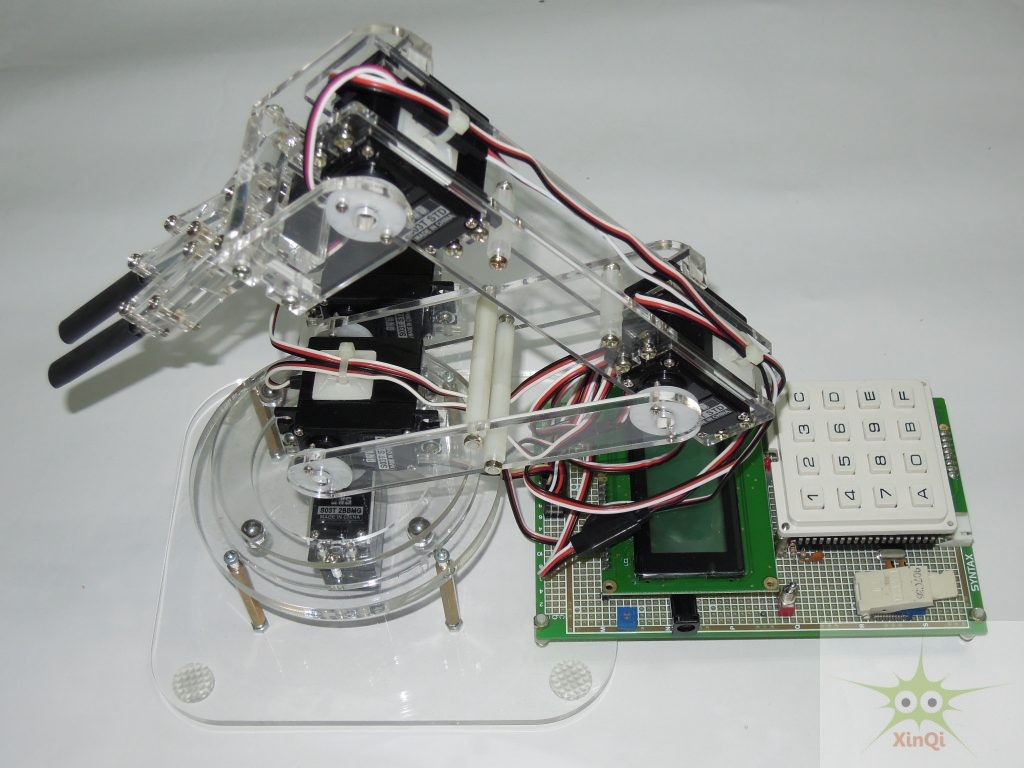
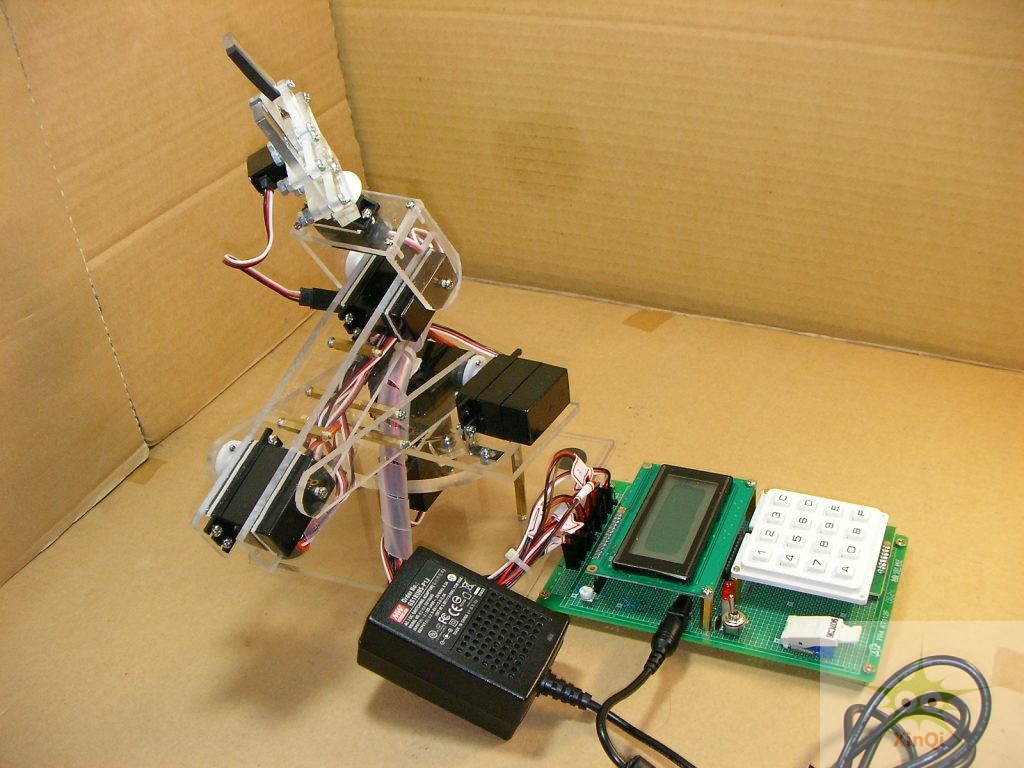
這台原型機是我十幾年前設計的作品,期間也修改設計許多不同版本,以當時的教具角度來看,這算是相當具有吸引力的一件作品,如今回顧,其實也並沒有失去其價值,坊間上的同級手臂成品,大概也都脫離不了這個架構。 這個作品除了機械架構外,主要的亮點還是電控的特殊設計,可由LCD幕編寫動作程序,並儲存動作程序於內部記憶體中,不需要透過電腦處理 。
記得當時為測試適合的伺服機,就吃了不少苦頭,燒掉不少money,如今回想也算是一個難得的經驗.
作品功能
- 可獨立控制8ch伺服器,有效控制角度0~180度。
- 可單板獨立編輯程序,不須要透過PC編輯程序。
- LCM(16*4) 顯示目前狀態及編輯程序狀態。
- 執行自編程序時,CH1~CH8 參數角度會直接顯示於LCM幕上。
- 內建3組展示(DEMO) 程序 及1組可編輯程序。
- 編輯程序最多可編輯25個動作程序角度(8ch可同時編輯,同時動作)。
- 每個動作程序可設定動作速度(1~99 單位)及停留時間(0.0S~9.9S)。
- 可設定完整動作程序重覆執行次數(1~199)。
- LED 指示目前是否處於執行狀態。
- 斷電系統參數及編輯程序內容不會消失。
操作說明
- 內定伺服機定義:
| CH1 | CH2 | CH3 | CH4 | CH5 | CH6 | CH7 | CH8 |
| 夾手 | 底部旋轉 | 下肢臂 | X | 中肢臂 | 上肢臂 | 夾手旋臂 | X |
- 伺服機接頭方向須注意。(黑色-> GND)
- 打開電源開關SW1 OR SW2。
- LCM幕顯示 = Key Function = 時,表示系統處於主功能畫面。
(此時有效按鍵為1,2,3,A,B,F)
按1-> 直接執行Demo1 程序。
按2-> 直接執行Demo2 程序。
按3-> 直接執行Demo3 程序。
按F-> 直接執行自編程序。
按A-> 直接執行系統參數設定(目前只有1項設定參數)。
RunCount (重複執行次數)->有效設定 1~199次。 (此時游標閃爍)
- 直接輸入設定數字。
- 設定完成按C 離開。
按B-> 進入自編程序瀏覽模式。
- 每按一次B鍵,會自動切至下一程序頁。
- 按F鍵à離開瀏覽模式,回到主功能畫面。
- 按E鍵à由瀏覽模式切換成自編輯模式。(此時游標閃爍)
- t->表示設定動作速度。(有效設定1~98; 0及99表結束取值)
- W->表示此程序動作完成後停留時間。(0~99) 表0~9.9S
- ~第十項->表示 CH1~CH8 角度設定值。(0~180度)
按C鍵->游標切換下一設定區,完成全部設定時,會自動將設定參數儲存。
按E鍵->當設定完成時,游標消失,此時再按E鍵時,可再進入自編輯模式。(此時游標閃爍)
按F鍵->當設定完成時,游標消失,此時按F鍵時,離開自編程序畫面,並回 到主功能畫面。