專題作品設計方案–自動/自走遞名片機器人
本作品設計構想源自於展覽會場,因為時常必須遞名片給參觀者及客戶,若能有自動遞名片的機器不知有多方便 。 這個作品大概是站長十幾年前設計的,現在再重新回顧,還是覺得十分有趣,一點都不會覺得過氣了!當年設計的原則是硬體設計盡量避免套用模組,這和目前教育界的想法已經有所不同,不過我還是認為基礎打底的重要性,畢竟業界量產時的考量並不是學界想的這樣,電路成本零件材料取得….整體都是需要考量的 。 (唉,偏離主題了)

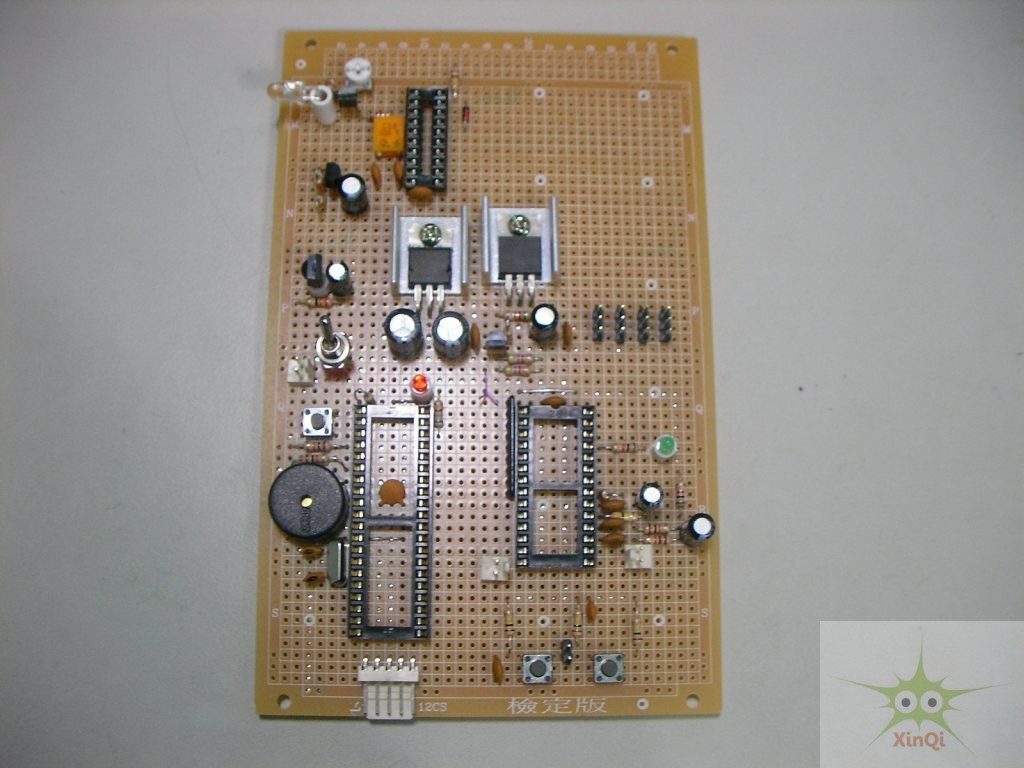
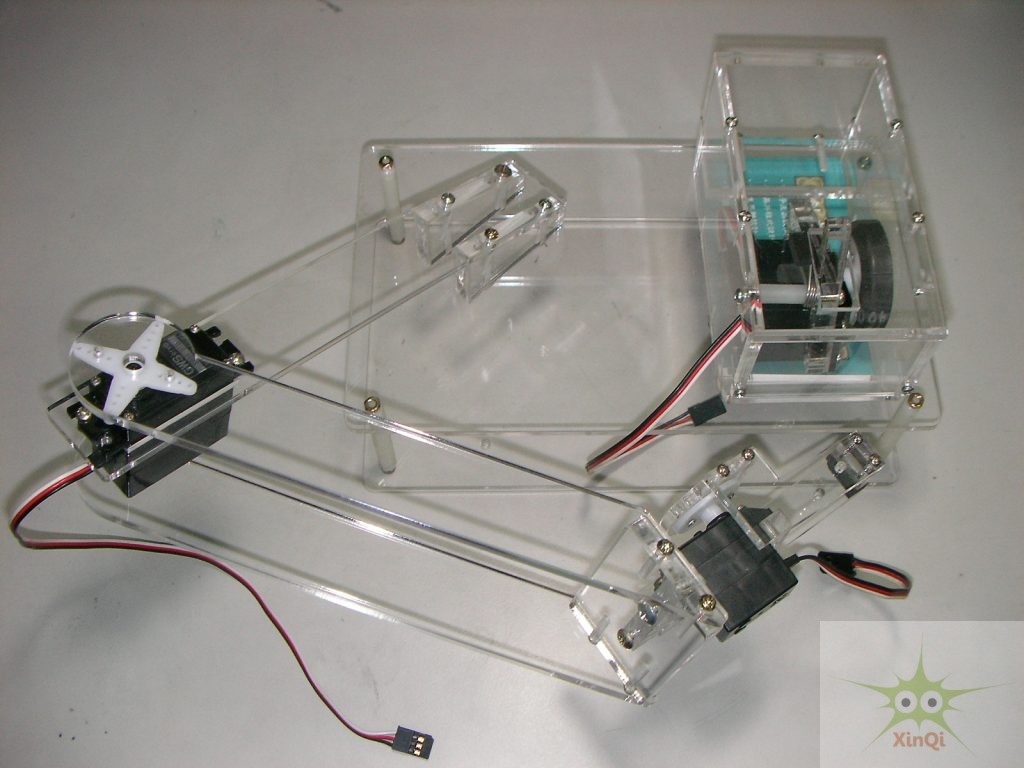
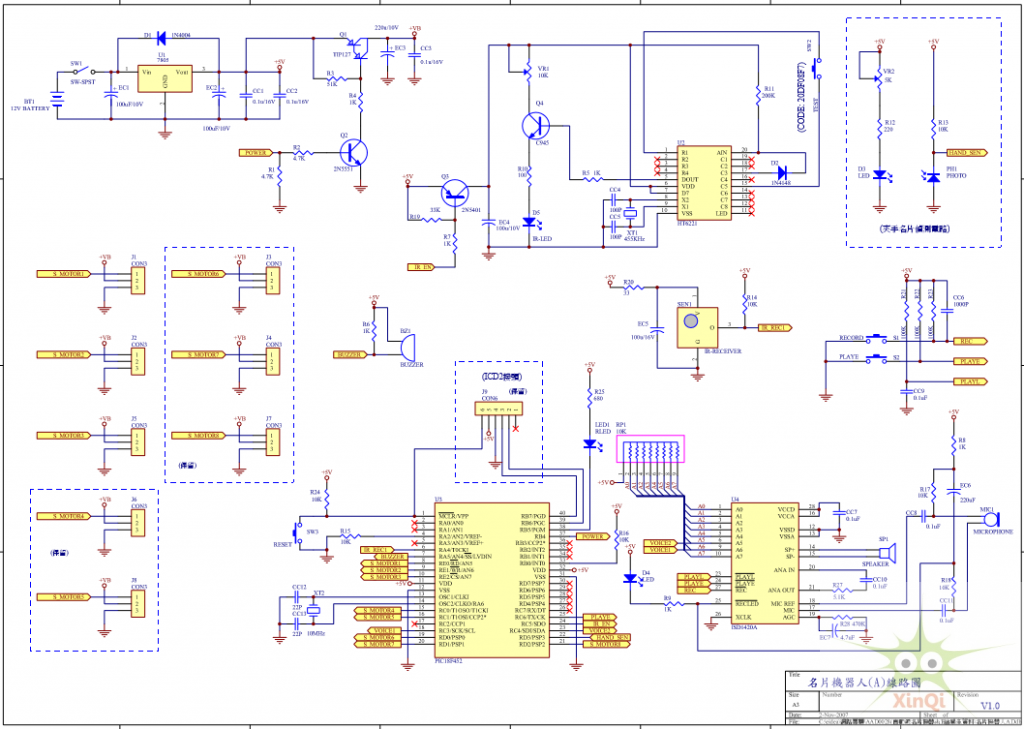
本作品強調單晶片(MCU)的基礎實作能力,軟體使用美商 microchip C撰寫,主要硬體由電子元件基本電路設計,沒有使用模組取代 。整體機械結構由雷射切割打造。
因應時代變遷,新訂單將重新設計結構及電路,讓作品創作生命得以延續!
專題功能
- 以8CH SERVO 控制器為基礎修改而成。
- 紅外線 感應 自動方式操作遞名片機制。(可由紅外線遙控器強制操作)
- 夾手自動偵測名片是否取出機制。
- 配合程序動作,內建4段語音播放功能。(每段語音可預錄最長 3.5S~4S 左右)
- 3次抽取名片失敗,系統警示功能。
- LED 指示目前是否處於執行狀態。
遙控用伺服機相關知識
遙控伺服機是體積小,扭力大,重量輕而且省電的馬達,在各種遙控模型上被廣泛使用,如遙控車,遙控飛機,直升機..等。伺服機是遙控模型控制的重要組件,不同遙控模型所需之伺服機種類亦不相同,各個廠牌也都有所差異。小型機器人領域看到這些優點,也大量運用 。
伺服機主要由外殼,電路板,直流馬達,齒輪與位置檢測器所構成,控制方式是以PWM信號方式加以控制,通常是以50~60HZ 為信號訊框周期,1.5mS為0點(90度),0.7mS 為左旋(0度),2.3mS為右旋(180度),有些廠牌會相反,使用時必需以實際測試為準。
操作說明
- 內定伺服機定義:
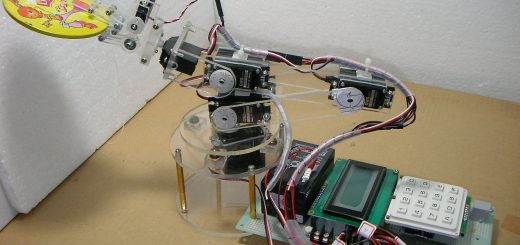
| CH1 | CH2 | CH3 | CH4 | CH5 | CH6 | CH7 | CH8 |
| 夾手 | 手臂 | 轉輪 | X | X | X | X | X |
- 伺服機接頭方向須注意。(黑色-> GND)
- 打開電源開關SW1。
- 當人員距離 40~60cm 左右時,自動感測遞送名片機制。
- 當客戶由夾手取出名片後,手臂將自動歸位。
- 萬用遙控器請將遙控碼設定在 ‘電視 001 ‘(有些遙控器遙控碼不同,實際出貨,遙控器背面會貼上遙控碼貼紙)。
手動強制操作
按遙控器’0’->完整程序操作(與自動感測遞送名片機制相同) 。
按遙控器’1’->程序1操作,(轉動名片,夾名片)
按遙控器’2’->程序2操作,(手臂遞出名片)
按遙控器’3’->程序3操作,(手臂回歸)
語音預錄操作
ISD1420 IC語音段表一 (DIP SW 1=OFF , 0=ON )
| A7~A0(BIN) | A7~A0(HEX) | 語音 |
| 00011111 | 1FH | 歡迎光臨 |
| 00111111 | 3FH | 謝謝惠顧 |
| 01011111 | 5FH | 錯誤,夾不到名片 |
| 01111111 | 7FH | 保留詞 |
| 01111111 | 7FH | (開關出廠預設) |