專題作品設計方案—特定場景自主式低成本自動停車系統

最近一有空檔,就將一些之前創作過,比較有趣或具有留存價值的專題/專案再重新整理了一下.也算是工坊的開發回憶吧!
這個作品的重點在,首先:車子是仿真車操控方式,轉向是用伺服馬達所操控,並非戰車型左右輪驅動方式,前進後退具有高低速控制.所以控制難度是比較高的.其次:感測成本很低,都是一些比較容易取得的零件/模組所設計,主要感測元件包含超音波模組,電子羅盤模組,光感測模組,紅外線感測模組….等.

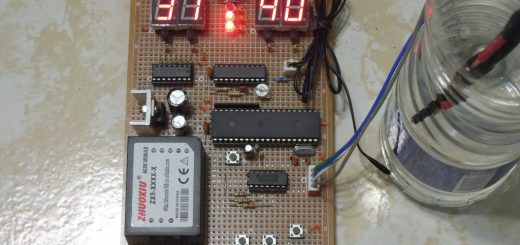
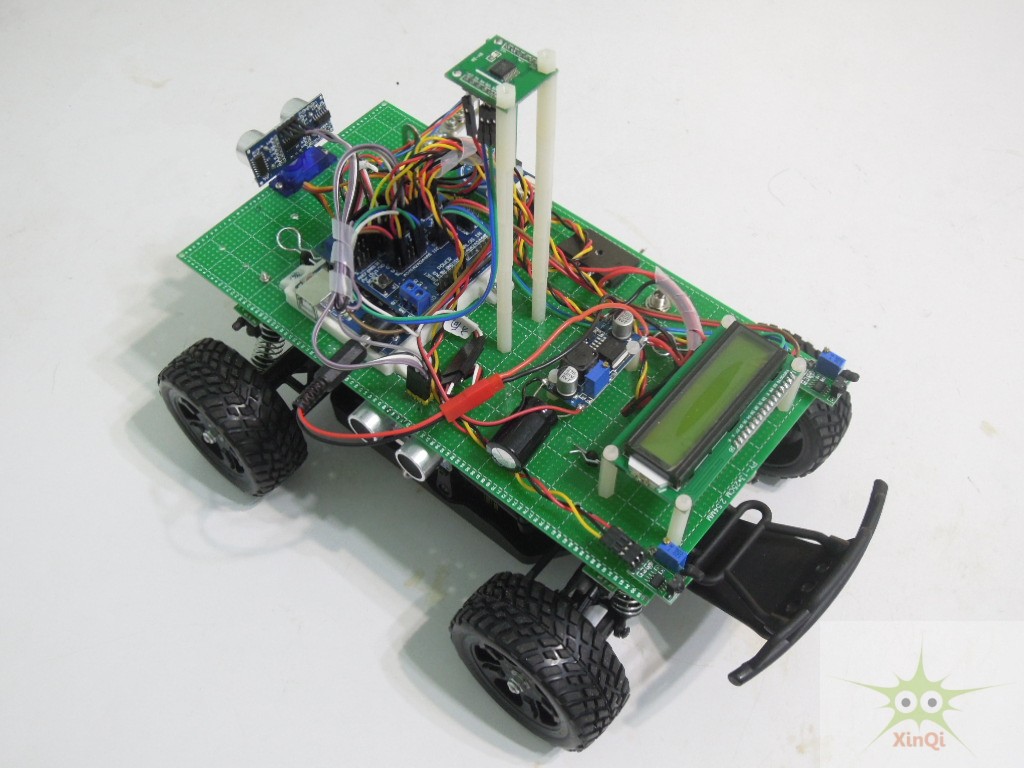
主要電子元件如上圖,本作品以arduino uno為開發板結合所有模組設計而成.

使用市售RC遙控車車體結構來改裝.
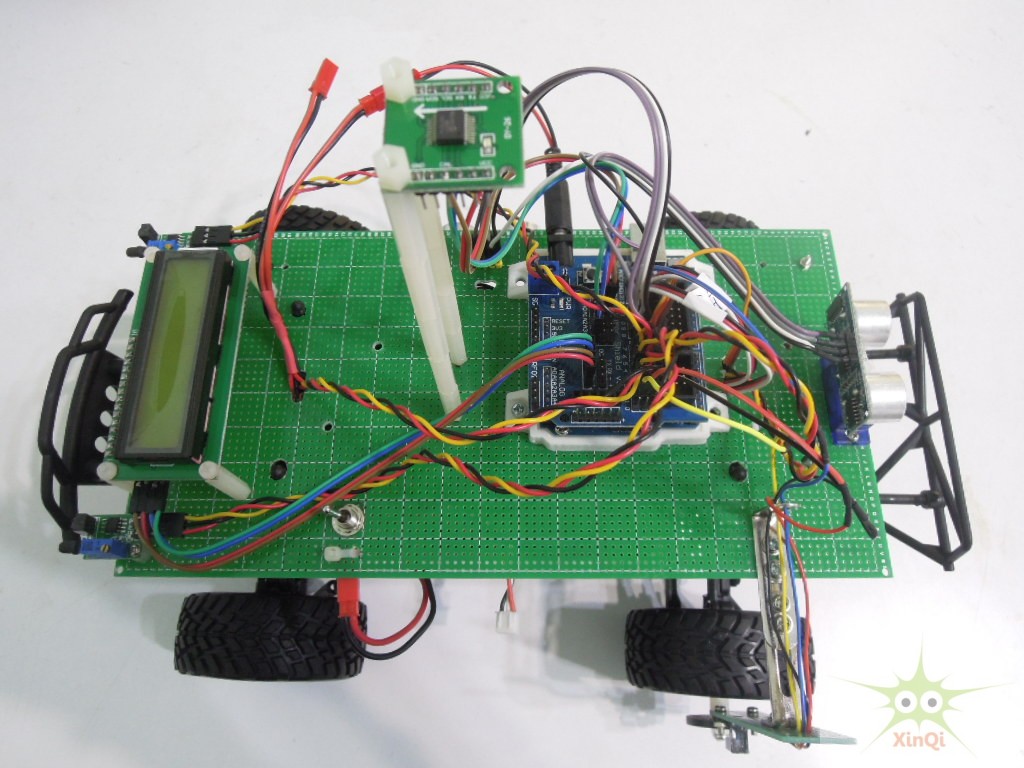
大致電路配置,由於電子羅盤容易受磁場影響,所以刻意將其架高,電子羅盤是辨別車體角度基準點的重要元件,也是計算方向轉向角度重要依據,前方兩組紅外線偵測其有無前方障礙物,後方超音波計算後方障礙物距離,方向轉向時,超音波也會跟著轉向,使其與後方障礙物保持一定平行,減少距離判斷誤差.
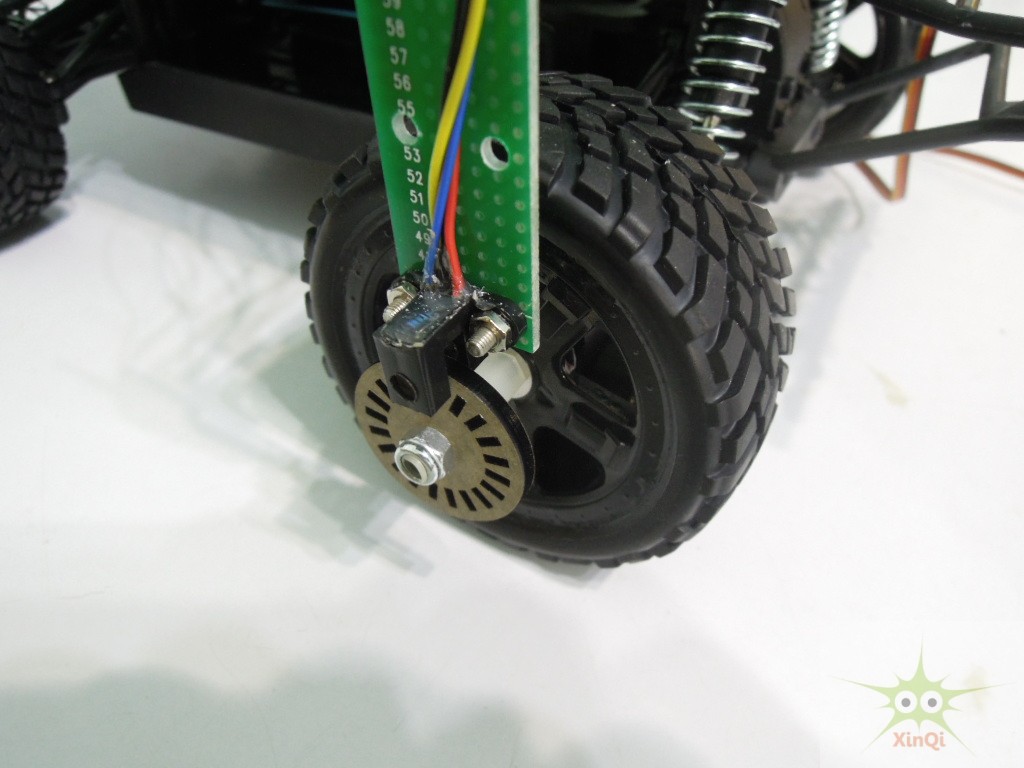
為了精準知道移動距離,使用光閘感測器,測量車體移動距離.
後記:
整體作品看似不難,但實際設計時,單單車體結構改裝及速度控制就花費許多時間,原本高速的馬達要在低速能平穩控制,在無物理減速齒輪單靠PWM控制其低速度行駛時,實在非常困難,因為速度過低,會失去扭力,造成失控現象,我想真的如果時間足夠,應該自行設計車體機構會是比較好的選擇.